By A Mystery Man Writer


Two configurations of the R 1 PR 1 R 2 -D L C F reconfigurable limb.

General 6R wrist-partitioned architecture.
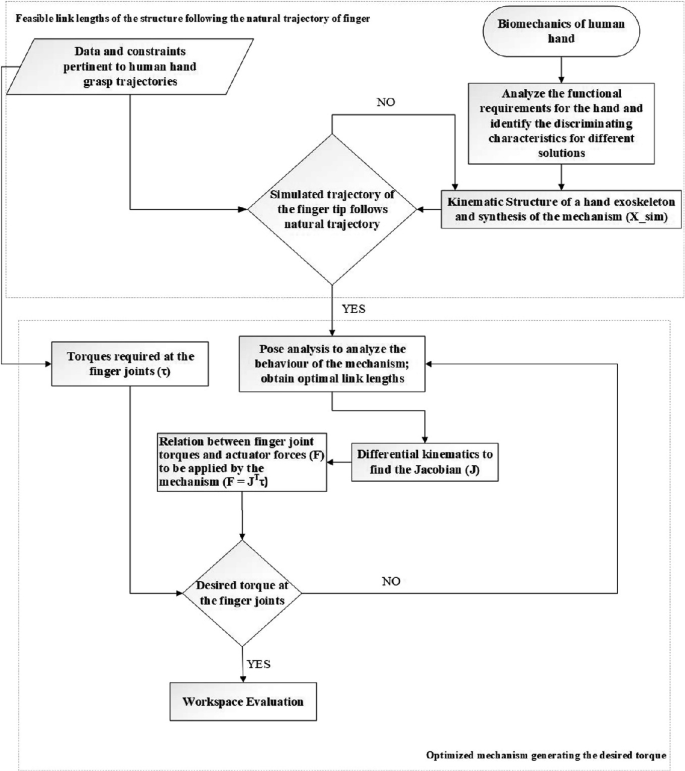
Kinematic Synthesis and Design of a Five Fingered Hand Exoskeleton

Two KUKA KR-15/2 wrist singular configurations.

Simulation of a two-RCM mechanism in software of SAM: (a) initial state

JCM, Free Full-Text

Classification and type synthesis of 1-DOF remote center of motion mechanisms - ScienceDirect

Two KUKA KR-15/2 wrist singular configurations.

Classification and type synthesis of 1-DOF remote center of motion mechanisms - ScienceDirect

Synthesis process of two-RCM mechanism: (a) multi-loop kinematic chain;

PDF) Kinematics and synthesis of a type of mechanisms with

a) A multi-RCM mechanism and (b) its simplified mechanism.
Optimum Seeking of Redundant Actuators for M-RCM 3-UPU Parallel Mechanism, Chinese Journal of Mechanical Engineering
Optimum Seeking of Redundant Actuators for M-RCM 3-UPU Parallel Mechanism, Chinese Journal of Mechanical Engineering

Type synthesis of 2R1T remote center of motion parallel mechanisms with a passive limb for minimally invasive surgical robot - ScienceDirect