A powered simple walking model explains the decline in propulsive force and hip flexion torque compensation in human gait
By A Mystery Man Writer

The Age-Associated Reduction in Propulsive Power Generation in Walking
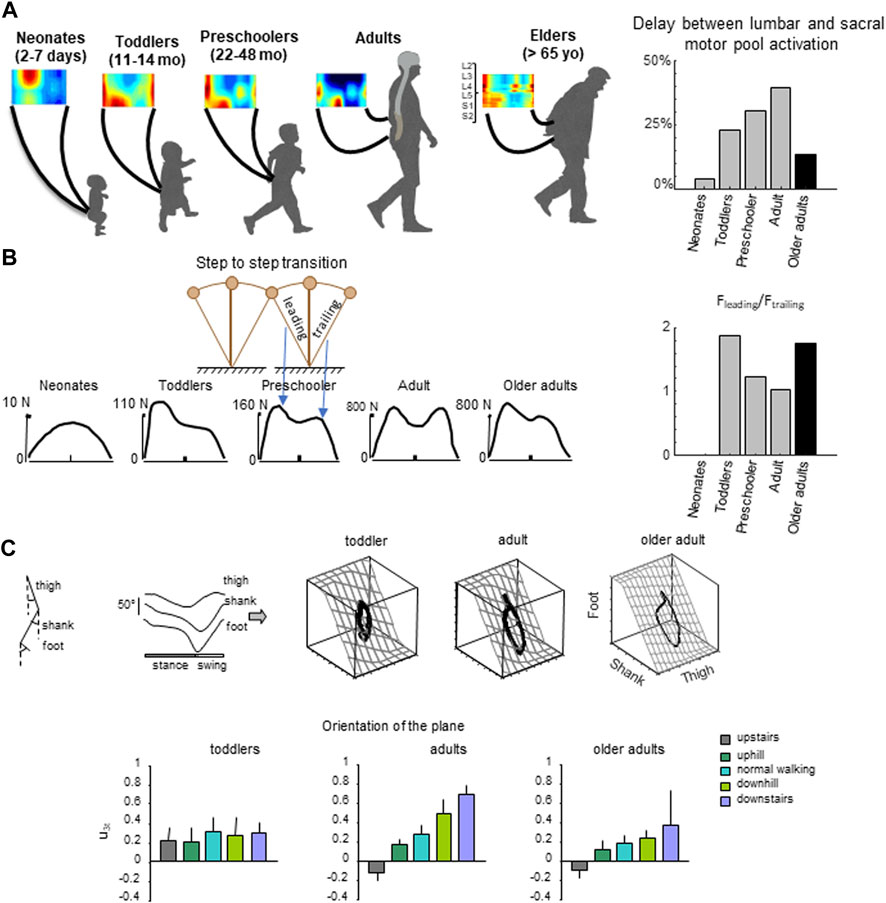
Frontiers Unraveling age-related impairment of the neuromuscular system: exploring biomechanical and neurophysiological perspectives

A powered simple walking model explains the decline in propulsive force and hip flexion torque compensation in human gait

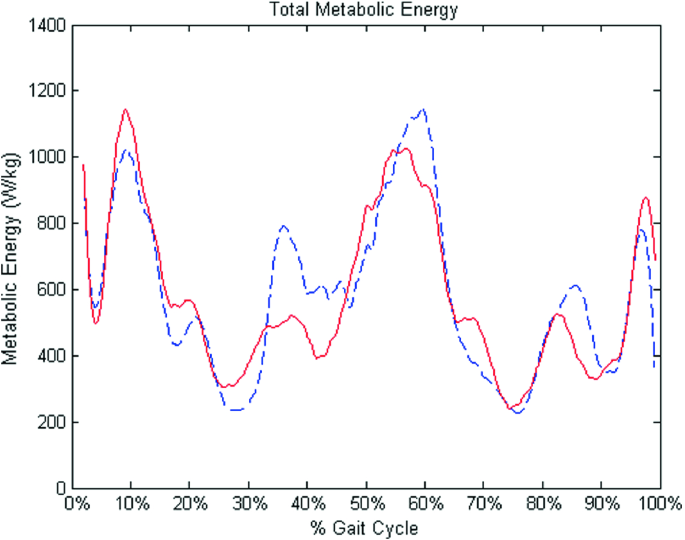
Hip joint power during walking and running. In the shaded interval of
Research articles Scientific Reports
Modeling the Effects of Linear and Torsional Spring Based Passive Assistance on Human Gait

Exoskeleton components and working process of the exoskeleton. A Back

Altering Compliance of a Load Carriage Device in the Medial

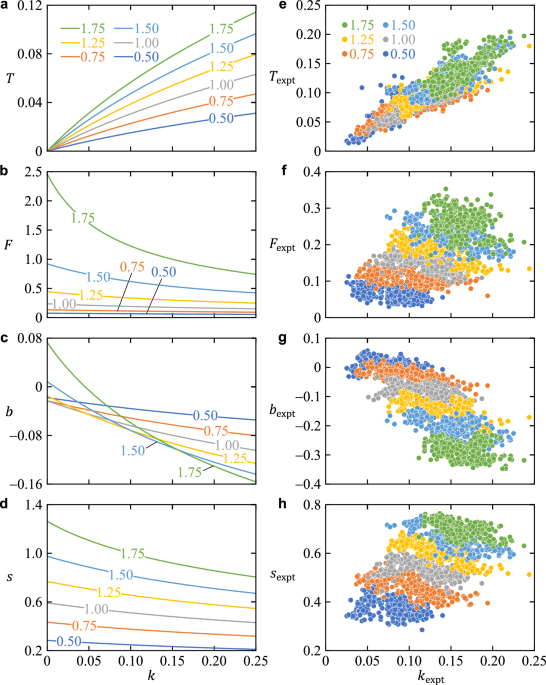
Relationship between v_N (N = 0, 1, 2, 3, 4) and the change in speed of

The reference limit cycle (red) and the actual solution (blue) for all

Locomotion Laboratory

Motion Trajectory Optimization of an Assistive Device During